Stack 2.0 Subtractive Machining with Industrial Robots in Timber Construction







The share of timber construction in the building industry has been growing worldwide for several years, among others because of its potential to decrease the environmental impact in building construction. At the same time, the construction industry is facing a severe shortage of skilled labour. These factors are leading to increased demand and, ultimately, the need to significantly improve the efficiency of production processes.
One promising approach is the digitalisation of the process chain and the implementation of new production methods. The processing of glued laminated timber beams is currently carried out by specialised joinery machines. One potential addition to the range of machines are standard multi-axis industrial robots, which have been used in the automotive industry for decades.
The Institute of Green Civil Engineering is investigating to what extent the possibilities of robotics can lead to an increase in production efficiency when machining timber construction elements. The research project was based on the FFG project Stack 2.0, which was conducted in collaboration with Rubner Holzbau GmbH. Following the completion of the project, the research was continued. The conducted studies in the BOKU Robot Laboratory focused on milling operations. The investigations consist of several steps, starting with the analysis of the state of the art and the identification of the possibilities offered by industrial robots. This is followed by machining trials to evaluate the machining quality of benchmark joinery machines and, in particular, industrial robots in terms of dimensional accuracy and surface quality. Subsequently, a study of workspace utilisation through the introduction of workpiece location systems is conducted and finally the modelling and machining of multi-part stacks is achieved.
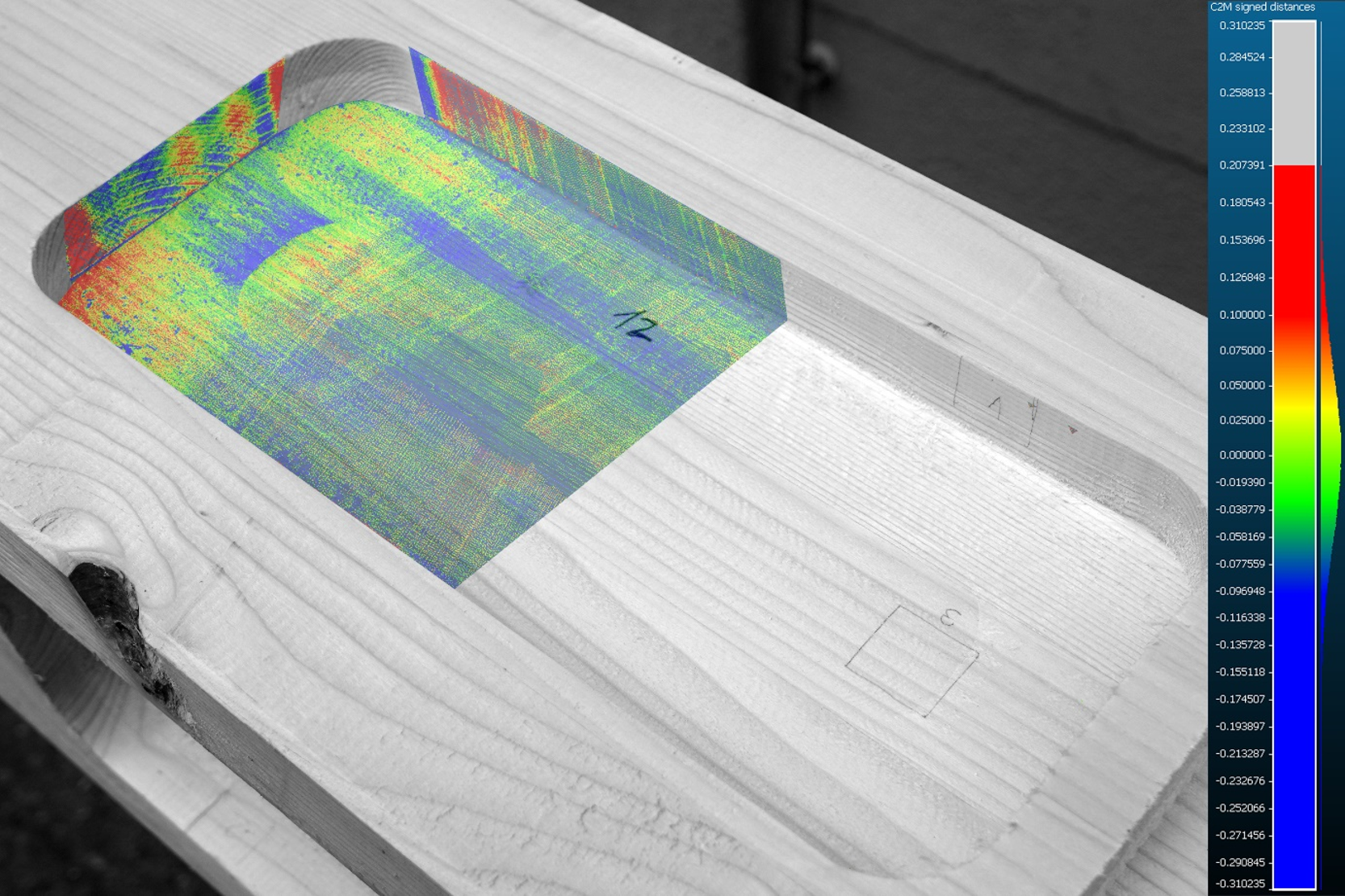
The analysis showed that the applicability of industrial robots for machining tasks is highly dependent on the end-effector specifications. The resulting machining quality in terms of dimensional accuracy and surface quality was found to be sufficient and competitive with joinery machines. The advantageously large workspace of industrial robot's was successfully exploited without reducing the machining accuracy to unacceptable levels, opening up future opportunities. In addition, to further improve machining efficiency, a model for creating optimal workpiece stacks was introduced, resulting in a reduction in machining time of up to 16% compared to individually machined workpieces.
Contact: