Stack 2.0







Der Anteil des Holzbaus im Bauwesen nimmt seit einigen Jahren weltweit zu, unter anderem aufgrund des Potentials den Umwelteinfluss im Zuge der Herstellung von Bauten zu reduzieren. Gleichzeitig ist die Bauindustrie mit einem gravierenden Mangel an qualifizierten Arbeitskräften konfrontiert. Diese Faktoren führen zu einer steigenden Nachfrage und letztlich zu der Notwendigkeit, die Effizienz der Produktionsprozesse deutlich zu verbessern.
Ein vielversprechender Ansatz ist die Digitalisierung der Prozesskette sowie die Einführung neuer Produktionsmethoden. Die Bearbeitung von Brettschichtholzträgern erfolgt derzeit mit speziellen Abbundmaschinen. Eine mögliche Ergänzung bestehender Produktionsanlagen stellen Standard-Mehrachs-Industrieroboter dar, wie sie in beispielsweise der Automobilindustrie seit Jahrzehnten eingesetzt werden.
Das Institut für Hochbau, Holzbau und kreislaufgerechtes Bauen untersucht die Möglichkeiten der Robotik hinsichtlich einer Steigerung der Produktionseffizienz bei der subtraktiven Bearbeitung von stabförmigen Holzbauteilen. Die Forschungsarbeiten basierten auf dem FFG Projekt Stack 2.0 in Kollaboration mit Rubner Holzbau GmbH und wurden nach Projektabschluss fortgeführt. In mehreren Schritten wird zunächst der Stand der Technik analysiert und daraus folgend das Potenzial, das Industrieroboter bieten, festgestellt. Im Anschluss erfolgen Versuche zur Bewertung der Bearbeitungsqualität in Bezug auf Maßgenauigkeit und Oberflächenqualität von Abbundanlagen, welche als Benchmark gelten, und insbesondere von Industrierobotern. Daraufhin wird die mögliche maximale Ausnutzung des Arbeitsraums des Industrieroboters durch die Einführung eines Systems zur Werkstück-Positionierung untersucht. Abschließend erfolgten die Programmierung eines Modells zur Ermittlung von Bauteilstapeln und deren Bearbeitung zur Reduktion der Bearbeitungszeit.
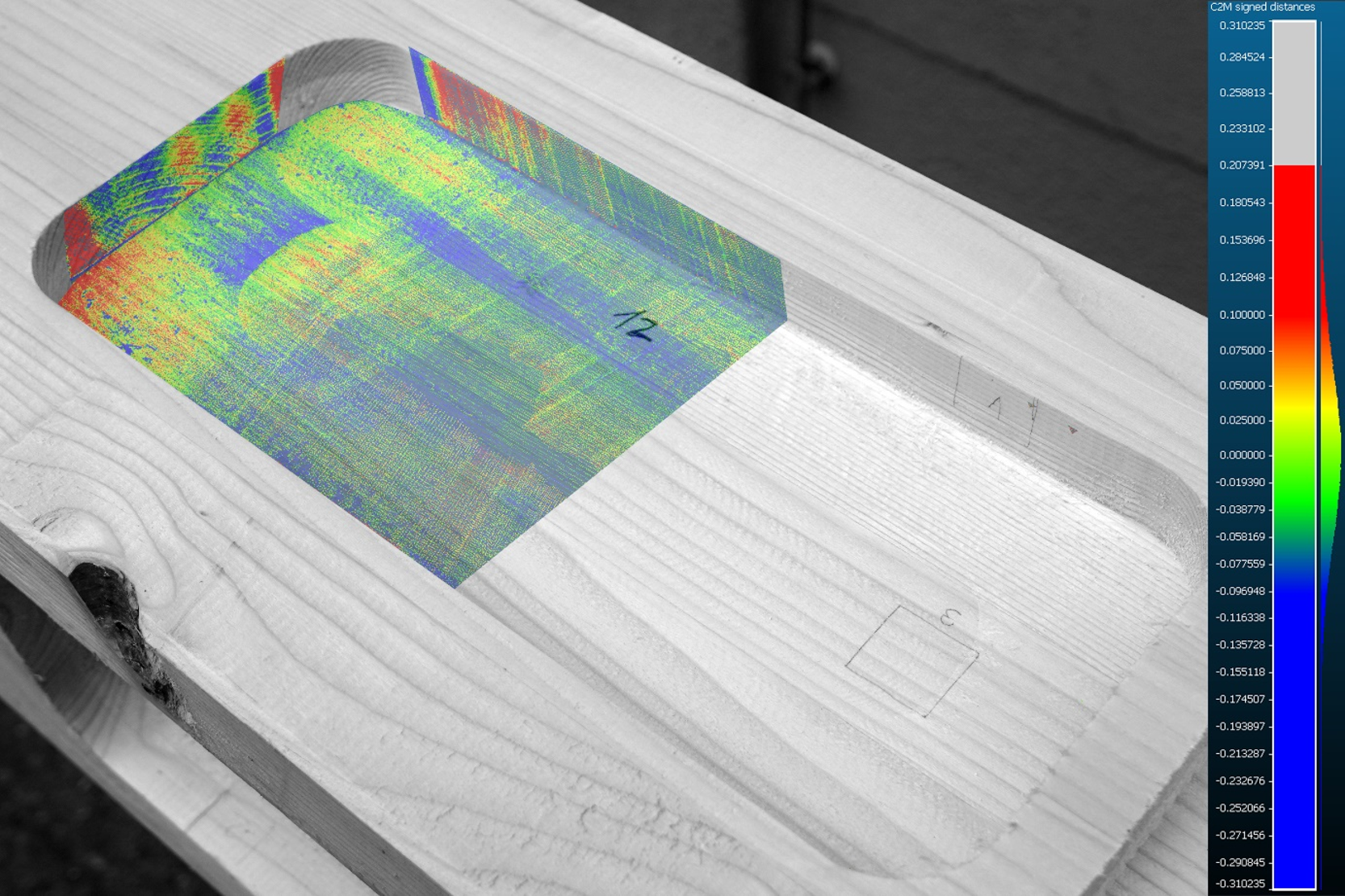
Die Analyse zeigt, dass die Anwendbarkeit von Industrierobotern zur subtraktiven Bearbeitung von Holz stark von den Spezifikationen des Endeffektors abhängt. Der Schwerpunkt dieser Arbeit liegt auf der Fräsbearbeitung von Brettschichtholz. Die resultierende Bearbeitungsqualität in Bezug auf Maßgenauigkeit und Oberflächengüte kann als ausreichend und konkurrenzfähig zu Abbundanlagen eingestuft werden. Der Vorteil des großen Arbeitsraums des Industrieroboters kann genutzt werden, ohne dass die Bearbeitungsgenauigkeit auf ein inakzeptables Niveau sinkt. Dadurch eröffnen sich zukünftige Möglichkeiten zur Stapelbearbeitung oder Nutzung mobiler Roboterplattformen. Darüber hinaus wurde zur weiteren Verbesserung der Bearbeitungseffizienz durch Stapelbearbeitung ein Modell zur Erstellung optimaler Werkstückstapel entwickelt, welches zu einer Reduzierung der Bearbeitungszeit um bis zu 16 % im Vergleich zu einzeln bearbeiteten Werkstücken ermöglicht.