")
Die Universität für Bodenkultur Wien widmet sich in Lehre und Forschung dem Thema Nachhaltigkeit und dem Management natürlicher Ressourcen.
Studium

Studium

Studium

Tagungsbericht FSV-Seminar 2017
Bei frostigen Temperaturen aber warmer Atmosphäre fand am 27. und 28. April 2017 in Admont im Gesäuse ein Seminar zum Thema „Automatisierte Fahrzeuge und die Konsequenzen für die Planung“ statt. Organisiert wurde die Veranstaltung von der Forschungsgesellschaft Straße-Schiene-Verkehr (FSV) in Kooperation mit dem Institut für Verkehrswesen der Universität für Bodenkultur (BOKU). Vertreter aus öffentlicher Verwaltung, Wissenschaft und Planung referierten und diskutierten aus unterschiedlichen Blickwinkeln über Potentiale, Risiken und planerische Herausforderungen des automatisierten Fahrens. Workshops in Kleingruppen und eine Podiumsdiskussion rundeten das Programm ab. Eine Verkostung lokaler Weine sowie der Besuch der Stiftsbibliothek verliehen der Veranstaltung außerdem einen kulturellen Rahmen.
Nach der Begrüßung durch Roman Klementschitz vom Institut für Verkehrswesen an der BOKU, ging es im ersten Block „Stand der Dinge“ um Rahmenbedingungen und erste Erfahrungen mit automatisierten Fahrzeugen.
Michael Nikowitz vom Bundesministerium für Verkehr, Innovation und Technologie (BMVIT) sprach über die entscheidende Rolle der öffentlichen Hand für die Umsetzung der vielfältigen Potentiale des automatisierten Fahrens. Er stellte Forschungsförderungen vor und berichtete über den Ausbau von Testumgebungen, die umfangreiche Testfahrten mit automatisierten Fahrzeugen ermöglichen sollen. Dabei betonte er, dass es zum jetzigen Zeitpunkt nicht nur darum gehe, automatisiertes Fahren zu ermöglichen. Vielmehr wolle man aus den Forschungs- und Testergebnissen wegweisende Anhaltspunkte für die weitere Planung gewinnen.
Karl Rehrl von Salzburg Research berichtete über erste Erfahrungen mit selbstfahrenden Minibussen. Ihr Potential sehe er etwa in der Erschließung der sog. „letzten Meile“. Der in Salzburg zu Testzwecken eingesetzte Minibus der Firma Navya sei ein Fahrzeug der Stufe 4 SAE, das bereits Verkehrsregeln erkennen und an Hindernissen vorbeifahren könne. Derartige Fahrzeuge seien vollständig manuell einzulernen. Außerdem treten derzeit noch Schwierigkeiten auf, bei denen die Begleitperson die Steuerung übernehmen muss.
Ein durchaus kritisches Bild skizzierte Thomas Hader von der Arbeiterkammer Wien, der die Automatisierung der Mobilität als einseitige, von IT-Konzernen vorangetriebene Entwicklung sieht. Aus Sicht der Beschäftigten sorgt er sich um den Verlust vieler Arbeitsplätze und um nachteilige Folgen des enormen Wettbewerbsdrucks im Transportsektor. Er stellte fest, dass neue Geschäftsmodelle, wie Konsum während der Fahrt, im Widerspruch zum erklärten Ziel der Ressourcenschonung stehe. Er sehe darin die Gefahr, dass Mobilität zunehmend zum Selbstzweck werden und das Verkehrsaufkommen massiv wachsen könne.
Aus rechtlicher Perspektive erläuterte Iris Eisenberger vom Institut für Rechtswissenschaften an der BOKU Herausforderungen und Neuerungen im Bereich des Zulassungs- und Verhaltensrechts. Nach derzeitiger Rechtslage seien Fahrzeuge der Stufen 0 bis 2 SAE rechtlich unproblematisch, ab Stufe 3 bestehe rechtlicher Anpassungsbedarf, der sich mit jeder Entwicklungsstufe verschärfe bzw. erweitere. Als Sonderproblem hob sie den Vertrauensgrundsatz der Straßenverkehrsordnung hervor, dessen Anwendung im automatisierten Verkehr auf erhebliche Schwierigkeiten stoße. Insgesamt seien die rechtlichen Problemstellungen jedoch lösbar und es bestehe großer rechtspolitischer Gestaltungsspielraum.
Im zweiten Block ging es um Zukunftsaussichten des automatisierten Fahrens. Mathias Mitteregger vom Institut für Architektur und Raumplanung an der TU Wien lehnte den Begriff der disruptiven Technologie im Hinblick auf automatisierte Fahrzeuge ab. Dabei argumentierte er, dass sich automatisiertes Fahren erst in der formativen Phase, also in den Anfängen seiner Entwicklung befinde. Wie jede Technologie würde sich auch autonomes Fahren erst durch gesellschaftlichen Gebrauch definieren. Anhand der Formulierung von „Use Cases“ untersucht sein Projekt „AVENUE 21“, wie sich autonomes Fahren im soziotechnischen System Stadt einordnen lässt und welche Aufgaben es aus der Sicht verschiedener Nutzer erfüllen kann.
Laut Udo Schüppel, Dipl. Psychologe bei der Fahrzeugsystemdaten GmbH (FSD) spielt neben der Automatisierung insbesondere die Vernetzung der Fahrzeuge eine zunehmend zentrale Rolle. Er schilderte neue Formen der Mobilität auf dem Weg zum fahrerlosen Fahren und veranschaulichte konkrete Anwendungsfälle wie Autobahnchauffeur, Platooning, automatisiertes Valet-Parking und fahrerlose Zustellautos in Computersimulationen. Durch die Schaffung einer geeigneten Infrastruktur können Fahrzeughersteller oder gar Städte zu Mobilitätsanbietern werden. Die größten Herausforderungen sah er in den Bereichen Haftung, Datenschutz, Datensicherheit und Mensch-Maschine-Interaktion.
Den dritten Block zum Thema „Chancen und Herausforderungen“ leitete Silvia Rief, Institut für Soziologie an der Universität Innsbruck, mit einem Vortrag über soziale und gesellschaftliche Dimensionen des automatisierten Fahrens ein. Sie ging vom Grundgedanken aus, dass Technologien wie automatisiertes Fahren in Vergesellschaftungsprozesse eingreifen, indem sie soziale Beziehungsformen verändern oder neu schaffen. Auch Rief schilderte verschiedene soziotechnische Szenarien bzw. „Skripten“ automatisierten Fahrens: Evolution (Weiterentwicklung des Individualverkehrs), Revolution (neue Geschäftsmodelle) und Transformation (Mobility on Demand). Jedes Skript könne gesellschaftliche Wechselwirkungen und Interaktionen unterschiedlich beeinflussen. Welche Szenarien sich durchsetzen werden, sei derzeit noch unklar. Denkbar sei eine anfängliche Koexistenz oder Vermischung. Für die langfristige Entwicklung könnten anfängliche Infrastruktur- und Fördermaßnahmen entscheidend sein.
Der Geschäftsführer von UbiGo, Tobias Haider, legte dar, dass gemeinschaftliche Nutzung der Schlüssel sei, um positive Potentiale der Automatisierung wie Verkehrssicherheit, soziale Inklusion und Umweltschutz bestmöglich auszuschöpfen. Insbesondere im ländlichen Raum könne die Automatisierung Formen der sogenannten „Shared Mobility“ vereinfachen bzw. erst ermöglichen. Hier bestehe im Vergleich zum urbanen Raum eine größere Notwendigkeit, da ein zunehmender Teil der Bevölkerung nicht (mehr) selbst ein Fahrzeug nutzen könne. Zudem sehe er hier auch ein größeres Potential für ökologische Verbesserungen, da im ländlichen Raum bisher der motorisierte Individualverkehr vorherrsche.
Maria Juschten und Reinhard Hössinger, Institut für Verkehrswesen an der BOKU, beleuchteten die Wirkungen des Automatisierten Fahrens auf Verkehr und Mobilität. Sie stellten fest, dass neue Steuerungselemente nötig seien, um Automatisiertes Fahren mit den verkehrspolitischen Zielen in Einklang zu bringen. Insbesondere gelte es, einem stärkeren Individualverkehr entgegenzuwirken und die Verkehrseffizienz zu verbessern. Ersteres könne man etwa durch die Förderung des öffentlichen Verkehrs und die Integration des Individualverkehrs in den öffentlichen Verkehr erreichen; letzteres indem man den Flächenbedarf des Individualverkehrs reduziert und die Elektromobilität stärker fördert. Abschließend fragten die Vortragenden das Publikum, auf welche Weise autonome Fahrzeuge am Verkehr teilnehmen sollen und wer die Parameter dafür festlegen solle: Technologieentwickler, Experten, Interessenvertreter, Politik oder Bürger. Dazu ließen sie die Zuhörerinnen und Zuhörer per Smartphone abstimmen. Besonders bei der Abwägungsfrage „flüssiger vs. sicherer Verkehr“, entschied das Publikum mit eindeutiger Mehrheit zugunsten einer Entscheidungskompetenz von Experten.
Eine weitere Verdrängung der Fußgänger aus dem öffentlichen Raum durch automatisierte Fahrzeuge befürchtete Petra Jens von der Mobilitätsagentur Wien. Wie soll Interaktion im Straßenverkehr künftig aussehen? Wird sie für alle möglich sein? Oder müssen auch Menschen vernetzt werden, um am Verkehr teilnehmen zu können? Jens warnte vor „Verkehrs-Erziehungsmaßnahmen“ im Interesse der Industrie. Die Fußgängerfreundlichkeit stelle einen wichtigen Parameter für die Lebensqualität einer Stadt dar und solle ein zentrales Anliegen der Verkehrsplanung bleiben. Letztendlich müsse eine konsequente Planung die Entwicklung des automatisierten Fahrens beeinflussen, nicht umgekehrt.
Im Laufe der Veranstaltung kristallisierte sich heraus, dass das Automatisierte Fahren eine Technologie ist, deren Entwicklung gerade erst beginnt. Ob aus technischer, rechtlicher, soziologischer oder verkehrsplanerischer Sicht betrachtet, es ist noch alles andere als klar, in welche Richtung sich dieser Trend entwickeln wird und welche Folgen er mit sich bringt. In einem Punkt waren sich jedoch alle Teilnehmer einig: Es ist an der Zeit, einen breiten öffentlichen Diskurs zu führen, um diese Entwicklung bewusst zu steuern und zu gestalten.
Sophia San Nicolò, Mai 2017
16.05.2017
Tagungsbericht FSV-Seminar 2017
")
Forschung
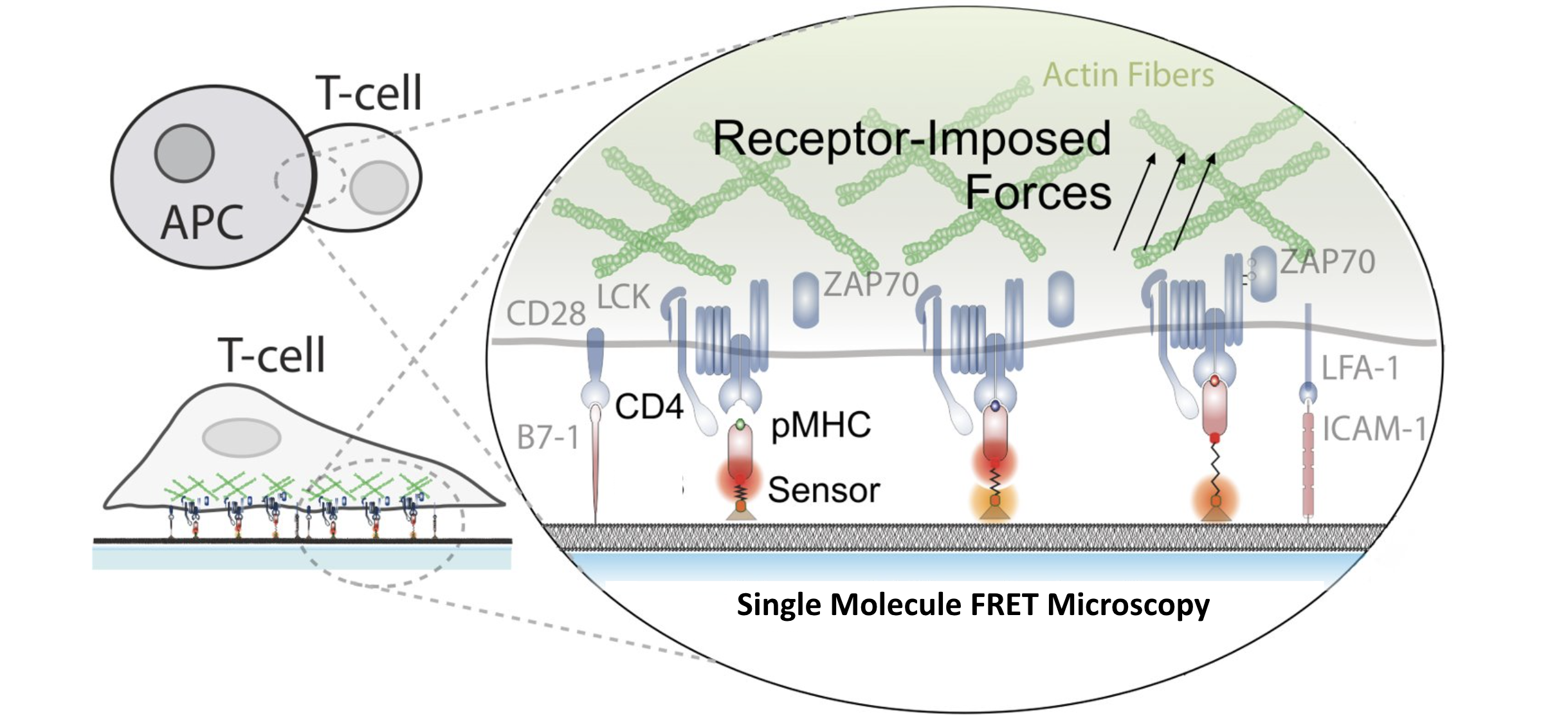
T-Zellen auf Zehenspitzen: Wie unser Immunsystem Krankheitserreger erkennt
Ein Forschungs-Team um die Molekularbiologin Janett Göhring von der BOKU Universität und der Medizinischen Universität Wien liefert neue Einblicke in die Funktionsweise unseres Immunsystems.